Types of Sensors Used in Lane Departure Prevention
Camera-Based Sensors
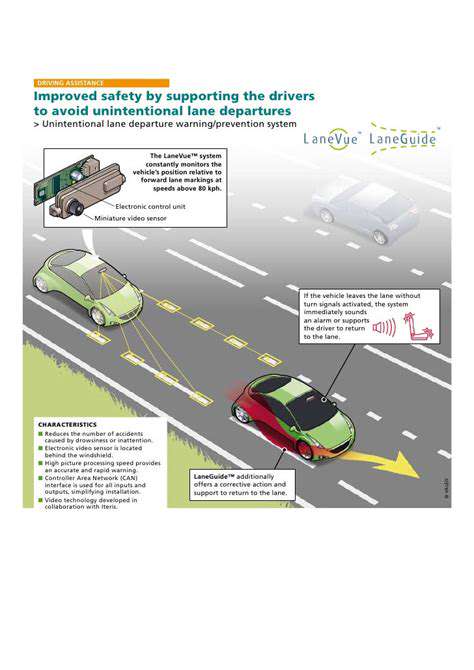
Camera-based sensors are a prevalent type of lane departure prevention system. These systems utilize one or more cameras mounted on the vehicle's windshield or dashboard. The cameras continuously monitor the lane markings on the road. Sophisticated image processing algorithms analyze the visual data to identify the lane boundaries. This allows the system to detect when the vehicle is drifting from its lane, providing crucial information for the control system to intervene. The system's accuracy relies heavily on the clarity and visibility of the lane markings, which can be affected by weather conditions or poor road surface markings.
Advanced camera systems can also recognize other important road elements, such as traffic signs and other vehicles, enhancing the overall safety and situational awareness of the system. They adapt to changing environments, and they are generally quite affordable compared to other sensor types. This makes them a cost-effective solution for integrating lane departure prevention into a wider range of vehicles.
Radar Sensors
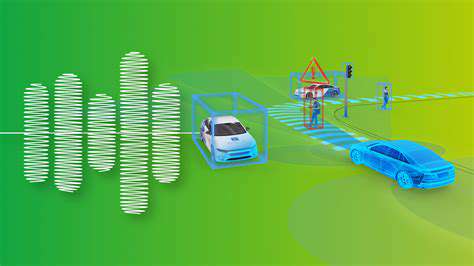
Radar sensors play a crucial role in lane departure prevention systems by detecting the presence of nearby vehicles and objects. They use radio waves to measure the distance and speed of surrounding vehicles. Radar sensors are particularly effective in low-light conditions or when visibility is reduced, such as during heavy rain or fog. They can also detect objects that are not readily visible to cameras, like motorcycles or slower-moving vehicles.
Radar systems are essential for providing a comprehensive view of the surrounding environment, aiding in preemptive actions. They work alongside cameras to build a more complete picture of the road and surrounding traffic, creating a more secure driving experience.
Ultrasonic Sensors
Ultrasonic sensors are used in some lane departure prevention systems to detect objects immediately around the vehicle. These sensors emit high-frequency sound waves and measure the time it takes for the waves to bounce back from an object. This allows the system to determine the distance and proximity of obstacles, including cars, pedestrians, and other road users. They are particularly useful for short-range detection, helping the driver maintain a safe distance in various driving scenarios.
While not as sophisticated as camera or radar systems, ultrasonic sensors provide valuable data for the overall safety of the vehicle and occupants. They are commonly used in conjunction with other sensor types, which together offer a more robust and comprehensive safety net.
GPS-Based Systems
GPS-based systems provide a crucial reference point for the vehicle's position on the road. By tracking the vehicle's location in relation to the lane markings, GPS data helps the system identify if the vehicle is deviating from its intended path. This data is processed in conjunction with other sensors, particularly cameras, to ensure accurate and reliable lane departure detection.
GPS information is used to establish a clear understanding of the vehicle's current location and direction. It is an essential element in a comprehensive lane departure prevention system, enhancing the overall safety features of the car.
Gyroscopic Sensors
Gyroscopic sensors measure the vehicle's angular velocity, which helps determine how quickly the vehicle is turning. This information is crucial for detecting unintended lane deviations. These sensors provide a real-time assessment of the vehicle's turning rate, giving the system valuable data for intervening and correcting course when necessary.
Gyroscopic sensors provide a direct measure of vehicle movement, enabling the system to quickly identify and respond to potential lane departure situations. Combined with other sensor data, they contribute to the overall precision and responsiveness of the lane departure prevention system.
Inertial Measurement Units (IMUs)
Inertial Measurement Units (IMUs) combine gyroscopic and accelerometer data to provide a comprehensive understanding of the vehicle's movement. They measure the vehicle's acceleration and angular velocity to track its motion accurately. This data is used to understand the vehicle's orientation and any sudden changes in direction that could indicate a lane departure. IMUs are crucial for providing a refined understanding of the vehicle's dynamic state and are often integrated into lane departure prevention systems.
IMUs contribute to the system's ability to react quickly to subtle or rapid changes in vehicle direction, ensuring effective intervention to maintain a safe driving experience. They provide a critical component of advanced driver-assistance systems (ADAS).
Understanding the Limitations of Lane Departure Prevention

Understanding the Constraints of Language Models
Large language models (LLMs) are powerful tools, capable of generating human-like text, translating languages, and answering questions. However, these models are not without limitations. Understanding these limitations is crucial for effectively using LLMs and avoiding potential pitfalls. These models are trained on massive datasets, and their performance heavily depends on the quality and representativeness of this data. This training data can reflect biases present in the real world, which can lead to skewed or unfair outputs.
Furthermore, LLMs often struggle with tasks requiring common sense reasoning or nuanced understanding of context. While they can mimic human-like responses, they lack true comprehension. They may produce outputs that appear logical but are fundamentally flawed due to a lack of underlying understanding. The outputs are based on statistical patterns in the data, not on genuine understanding.
Data Dependency and Bias
LLMs are inherently data-dependent, meaning their performance is directly tied to the quality and characteristics of the training data. If the training data contains biases, inaccuracies, or harmful stereotypes, the LLM will likely perpetuate these issues in its outputs. This can lead to unfair or discriminatory outcomes, particularly in applications dealing with sensitive information.
For example, if an LLM is trained on a dataset that predominantly reflects a particular cultural perspective, it might exhibit biases against other cultures or perspectives. Identifying and mitigating these biases is a significant challenge in LLM development and application. Carefully curated and diverse datasets are crucial to minimize the risk of biased outputs.
Limitations in Reasoning and Problem-Solving
While LLMs can generate coherent text, they often struggle with complex reasoning and problem-solving tasks that require a deeper understanding of cause and effect. They can excel at mimicking human-like responses, but they cannot truly reason or solve problems in the same way that humans can. This limitation is particularly apparent when dealing with novel or unconventional situations.
These models can struggle with tasks that demand logical deduction, critical thinking, or creativity. They can provide plausible-sounding responses, but their underlying reasoning may be superficial or inaccurate. It is essential to evaluate the output critically and verify its accuracy before relying on it for important decisions.
Contextual Understanding and Hallucinations
LLMs often struggle with maintaining consistent context over extended pieces of text. They can perform well in isolated sentences or short paragraphs, but their understanding can break down as the context becomes more complex. This can lead to inconsistencies and errors in longer documents or conversations.
Another significant limitation is the tendency for LLMs to hallucinate, generating outputs that seem plausible but are completely fabricated. These fabricated outputs can be highly convincing, making it challenging to distinguish between accurate and inaccurate information. Thorough verification and validation steps are essential to ensure the reliability of LLM-generated content.
Steering Assist and Driver Responsibility
Steering Assist Systems Explained
Steering assist systems, often integrated into advanced driver-assistance systems (ADAS), aim to enhance driver safety and control by providing subtle interventions to maintain lane position. These systems typically use cameras and sensors to monitor the vehicle's position relative to lane markings and adjust the steering slightly to help the driver stay centered. It's crucial to understand that these systems are designed to assist, not to replace, the driver's responsibility for safe operation.
Understanding how these systems work is vital for appreciating their limitations. They rely on data from their sensors, and environmental factors such as glare, shadows, or poor road markings can affect their accuracy. The degree of intervention varies significantly between different systems, ranging from gentle nudges to more pronounced steering corrections. Constant monitoring and awareness of the system's capabilities are key.
Driver Responsibility in Lane Keeping
Despite the presence of steering assist features, the driver remains ultimately responsible for maintaining safe lane positioning. This responsibility includes actively monitoring the road ahead, maintaining situational awareness, and being prepared to override the system if necessary. A driver's attentiveness and appropriate reaction times are critical factors in mitigating potential risks associated with lane departure.
Drivers should understand that steering assist systems are tools to aid in lane keeping, not a substitute for focused driving. Neglecting the responsibility to actively control the vehicle and engage in safe driving practices can compromise the effectiveness of the system and potentially lead to an accident. Regularly checking the system's status and understanding its limitations is part of responsible driving.
Limitations and Potential Errors
Steering assist systems, like all technological aids, have limitations. For instance, they may struggle in challenging conditions such as heavy rain, snow, or poor visibility, where the accuracy of sensor data is compromised. Furthermore, the system's ability to recognize and interpret lane markings can be affected by faded or obscured lines. Understanding these potential limitations is crucial for maintaining a safe driving experience.
Drivers should be aware that the system's performance is dependent on the quality and clarity of the data it receives. Factors like glare, shadows, or even poorly maintained road markings can interfere with the accuracy of the system's lane-keeping assistance. Awareness of these potential errors is important to manage expectations and ensure continued vigilance.
Understanding Lane Departure Warnings
Lane departure warnings are an integral part of steering assist systems. These warnings typically alert the driver with visual and/or audible signals when the vehicle deviates from its lane unintentionally. The signals are designed to prompt the driver to take corrective action. Recognizing these warnings and understanding their purpose is essential for safe lane maintenance. Understanding the difference between a warning and an intervention is critical for responsible engagement with the system.
System Calibration and Maintenance
Regular calibration and maintenance of steering assist systems are crucial for optimal performance. This ensures the system's sensors and algorithms are functioning correctly and providing accurate data for lane keeping. Drivers should be aware of the importance of checking the system's status and reporting any malfunctions or inconsistencies. These steps will enhance the system's effectiveness and help maintain safe driving practices.
Ignoring maintenance recommendations or overlooking issues can lead to inaccurate readings and reduced effectiveness of the steering assist system. Maintaining the system's reliability, through proper calibration and maintenance, is a vital aspect of responsible driving and contributes to a safer driving experience.