Rule-Based Systems: An Overview
Rule-based systems (RBS) are computational models that employ a set of predefined rules to make decisions and solve problems. These rules, typically expressed in an if-then format, define the conditions under which a particular action should be taken. This structured approach allows for a clear and well-defined process, making the system's logic transparent and easier to understand and maintain. Rule-based systems are widely used in various domains, including expert systems, decision support systems, and control systems.
A key advantage of RBS is their flexibility. They can be easily adapted to changing circumstances by modifying or adding rules. This adaptability makes them suitable for dynamic environments where the problem domain might evolve over time. This flexibility allows for a much more agile response to changing needs and conditions.
Rule Structure and Representation
Rules in a rule-based system typically follow a simple if-then structure. The if part, known as the antecedent or condition, specifies the conditions that must be met for the rule to be applicable. The then part, known as the consequent or action, defines the actions that should be executed if the conditions are satisfied. This straightforward format facilitates the encoding of expert knowledge and decision-making logic within the system.
The representation of rules can vary, but common methods include using logical expressions or production rules. This representation allows for the efficient manipulation and application of rules by the system's inference engine. The structure allows for clear and concise expression of complex logic.
Inference Engines and Reasoning
The heart of a rule-based system is the inference engine. This component is responsible for applying the rules to the input data and deriving conclusions. It works by matching the current input data against the conditions of the rules and executing the corresponding actions when a match is found. This process is crucial for automating decision-making and achieving desired outcomes.
The inference engine employs various reasoning strategies, such as forward chaining or backward chaining, to determine the order in which rules are applied. These strategies can significantly impact the efficiency and effectiveness of the system's performance. Forward chaining starts with the facts and works forward to derive conclusions, while backward chaining starts with the goal and works backward to find the necessary facts.
Applications and Examples
Rule-based systems have a wide range of applications across diverse fields. In healthcare, they can assist in diagnosis and treatment planning based on patient symptoms and medical history. In finance, they can be used for fraud detection and risk assessment. In manufacturing, they can automate quality control processes and optimize production schedules. This versatility makes rule-based systems a valuable tool in various industries.
A common example is a simple expert system for diagnosing a particular type of mechanical failure. The system has a set of rules that link specific symptoms to possible causes. When presented with a set of symptoms, the inference engine applies the appropriate rules to arrive at a diagnosis. This automation can improve the efficiency and accuracy of decision-making in such applications.
Hybrid Approaches: Combining the Best of Both Worlds
Sensor Fusion for Enhanced Perception
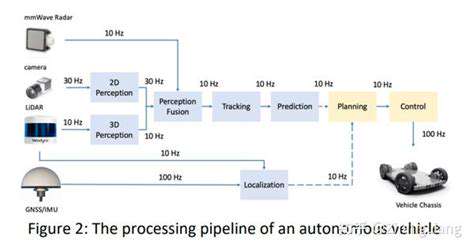
Sensor fusion plays a crucial role in autonomous driving algorithms, combining data from various sources like cameras, LiDAR, and radar to create a comprehensive and robust perception of the environment. This integration allows the system to overcome limitations inherent in individual sensors. For instance, cameras excel at capturing visual details, but struggle in low-light conditions. LiDAR, on the other hand, provides accurate depth information but can be affected by dense fog or rain. By merging data from multiple sensors, the system can effectively enhance its understanding of the scene, leading to more accurate object detection and classification.
This hybrid approach allows the algorithm to leverage the strengths of each sensor, mitigating their weaknesses. The result is a more reliable and robust perception system, crucial for safe and efficient autonomous driving in diverse weather conditions and lighting scenarios. This fusion process is often computationally intensive, requiring sophisticated algorithms to effectively integrate and interpret the data from multiple sources.
Learning-Based Algorithms for Adaptive Control
Learning-based algorithms are increasingly being integrated into autonomous driving systems, enabling them to adapt to dynamic environments and optimize their control strategies. Machine learning models, such as deep neural networks, can be trained on vast datasets of driving scenarios to learn optimal control policies. This approach allows the system to react more effectively to unexpected situations and adjust its behavior in response to changing traffic conditions.
By learning from historical data, the system can identify patterns and correlations in the driving environment, and then use this knowledge to anticipate and react to potential hazards. This adaptive control capability is essential for navigating complex and unpredictable road conditions, and for handling diverse traffic patterns and behaviors. This learning process requires constant data collection and refinement to ensure the model remains accurate and effective in real-world applications.
Rule-Based Systems for Predictable Behavior
Despite the power of learning-based algorithms, rule-based systems remain an important component of autonomous driving systems. Rule-based approaches provide a structured and predictable way to handle specific situations and ensure adherence to traffic laws and regulations. These systems define clear rules for handling various scenarios, such as lane changes, intersections, and pedestrian crossings, allowing for consistent and safe behavior.
The combination of learning-based systems for general situations and rule-based systems for specific, predefined events creates a more robust and reliable autonomous driving system. Rule-based systems are particularly valuable in scenarios where precise and predictable actions are required, ensuring adherence to pre-established safety protocols and regulations. This often includes handling edge cases, where the learning algorithms might not have sufficient training data.
Hierarchical Control Architectures for Complex Tasks
Autonomous driving systems often involve a complex interplay of various tasks, including path planning, object detection, and vehicle control. A hierarchical control architecture can effectively manage these complex tasks by organizing them into different levels of abstraction. This approach allows the system to prioritize tasks and delegate specific responsibilities to different modules.
At the highest level, the system might focus on high-level goals, like reaching a destination. Lower levels then handle more specific tasks, such as lane keeping and avoiding obstacles. This hierarchical structure allows for efficient task management and ensures that different components of the system can operate effectively and in harmony. This hierarchical approach is crucial for handling the multifaceted nature of autonomous driving, allowing for a division of labor that optimizes performance.
Real-Time Optimization for Dynamic Environments
Autonomous driving systems must adapt to constantly changing environments, including dynamic traffic patterns, unexpected obstacles, and varying road conditions. Real-time optimization techniques are essential for enabling the system to make rapid decisions and adjustments in these dynamic situations.
These techniques involve continuously evaluating the current situation, predicting future scenarios, and adjusting the system's behavior accordingly. This rapid adaptation is critical for maintaining safety and efficiency in real-world driving environments. This continuous optimization is essential to mitigate the impact of unexpected events and keep the autonomous vehicle operating safely and effectively under various conditions.